Quady - Tiny Drone Design
Arduino-based Quadcopter with iOS Controller App
Share on:Overview
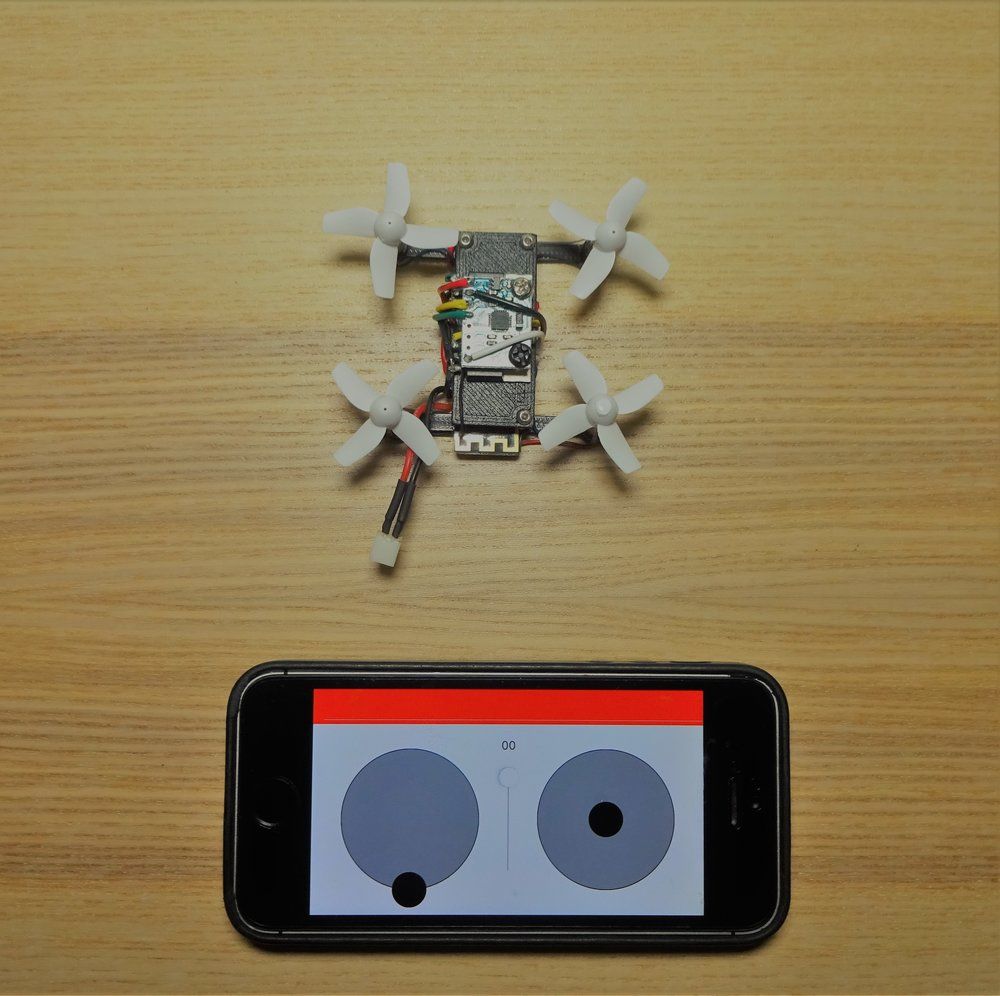
Quady is my attempt to build a mini quadcopter controlled by iOS device through bluetooth. Arduino controls each motor using MOSFET and receives positional data through gyroscope module.
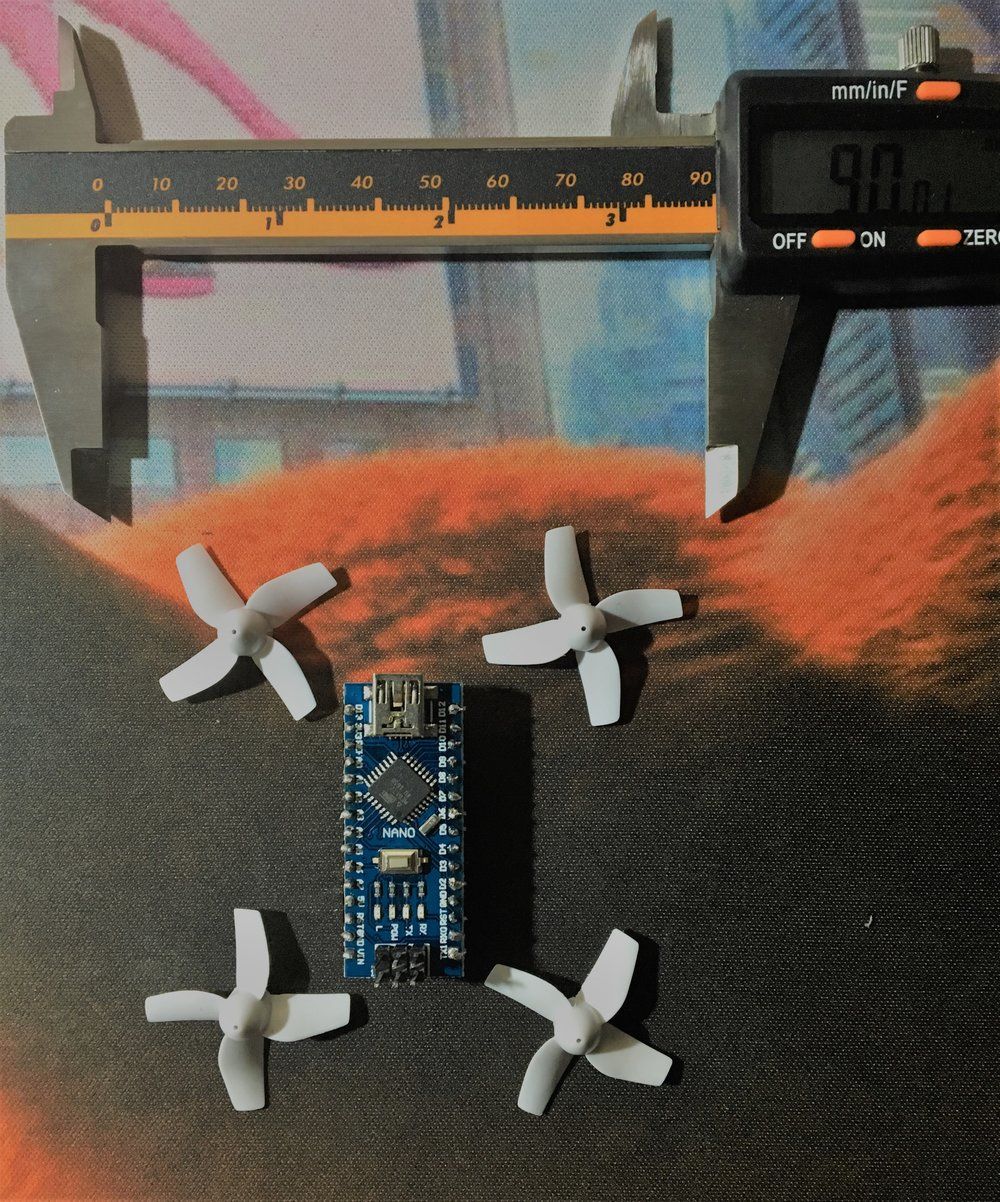
Miniature Size
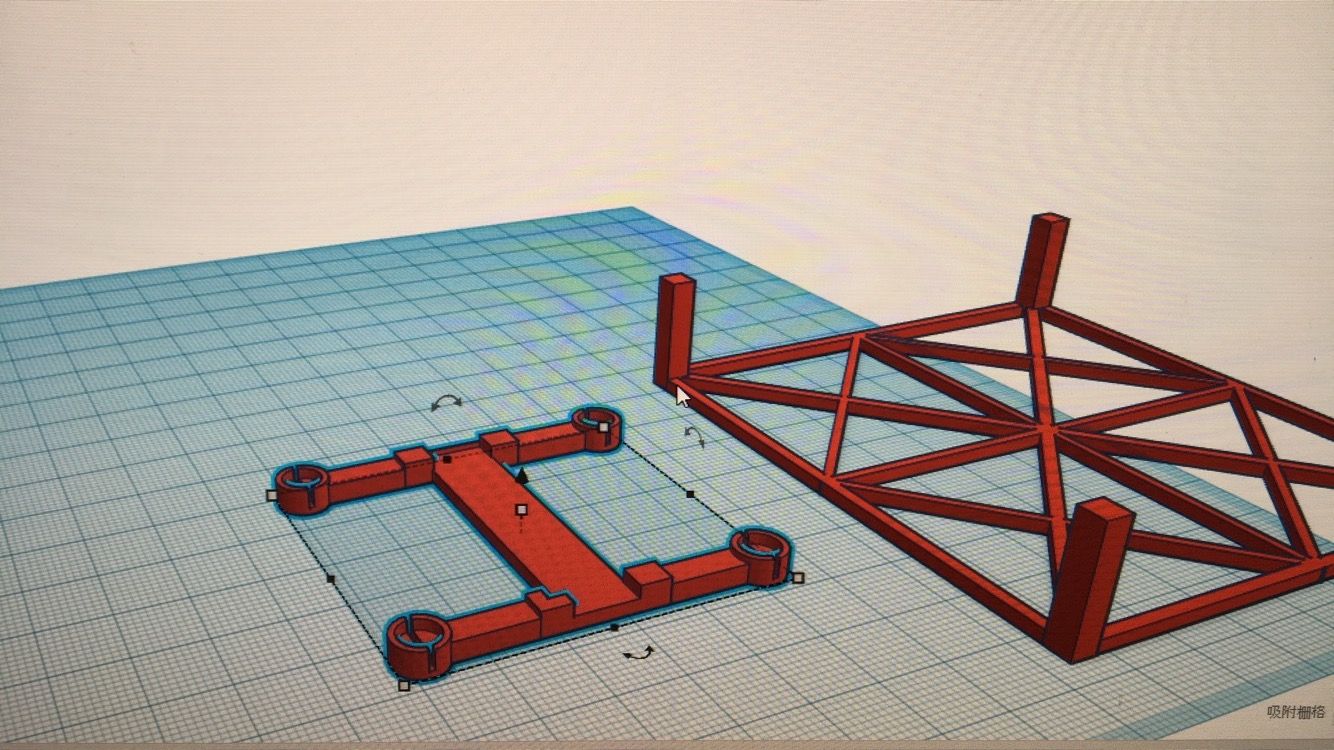
Frame Design on TinkerCAD
I designed the frame in a minimalistic way so that the Arduino can fit in neatly and that towers of sensors can be built on top.
Testing MOSFET
Arduino directly controls the current draw of each motors through MOSFETs. These little modules carry out similar function to ESC(Electric Speed Control) on larger quadcopters on the market.
Assembly
Motors are fitted into the seats with hot glues. However, as later testing suggest, the motors might come off as they get hotter during flight and melt the glue.
.jpg)
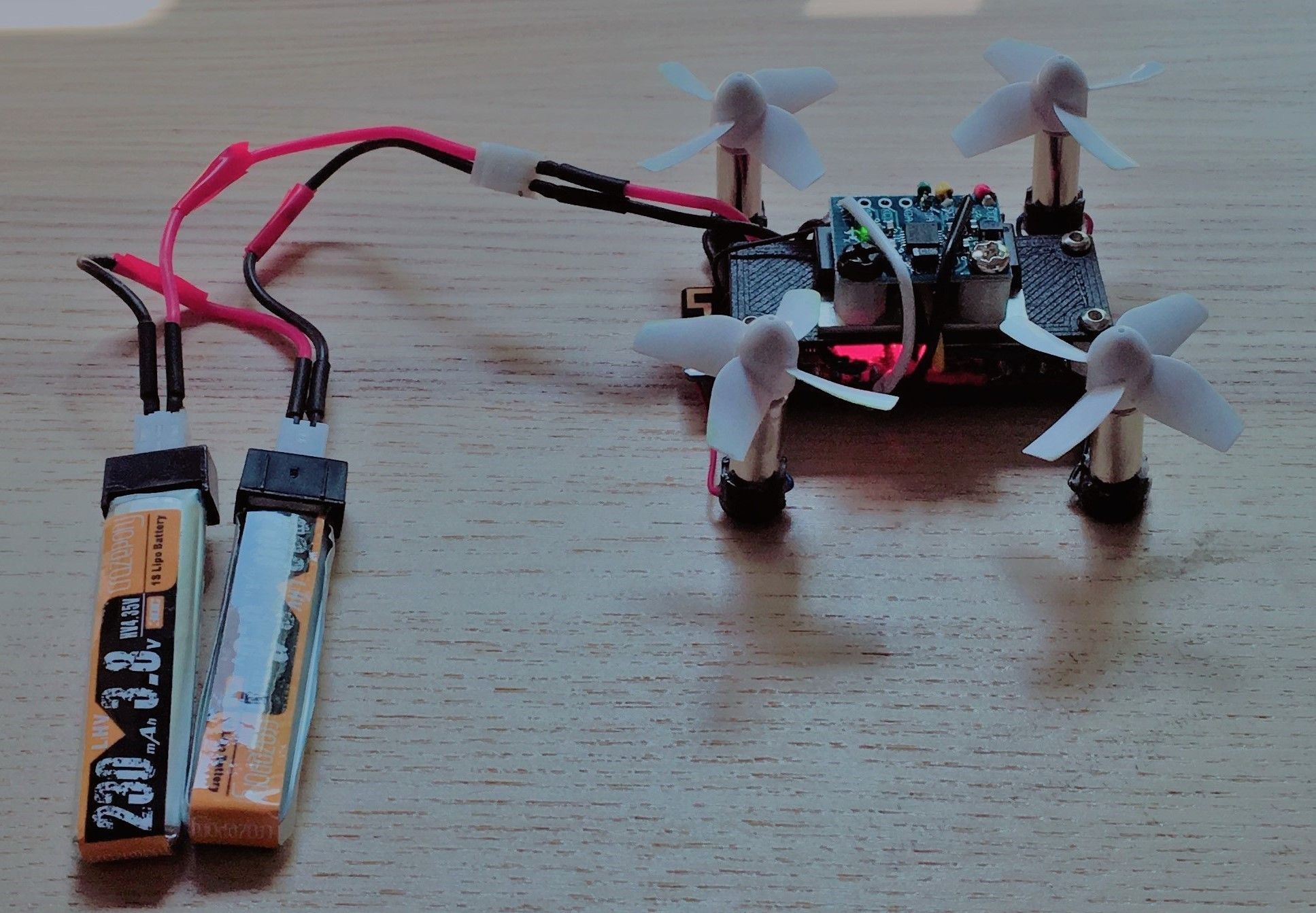
Parallel Battery Connected
The batteries provide strong current to the motors. But their bulky size isn’t desirable for aesthetics and agility of the quadcopter.
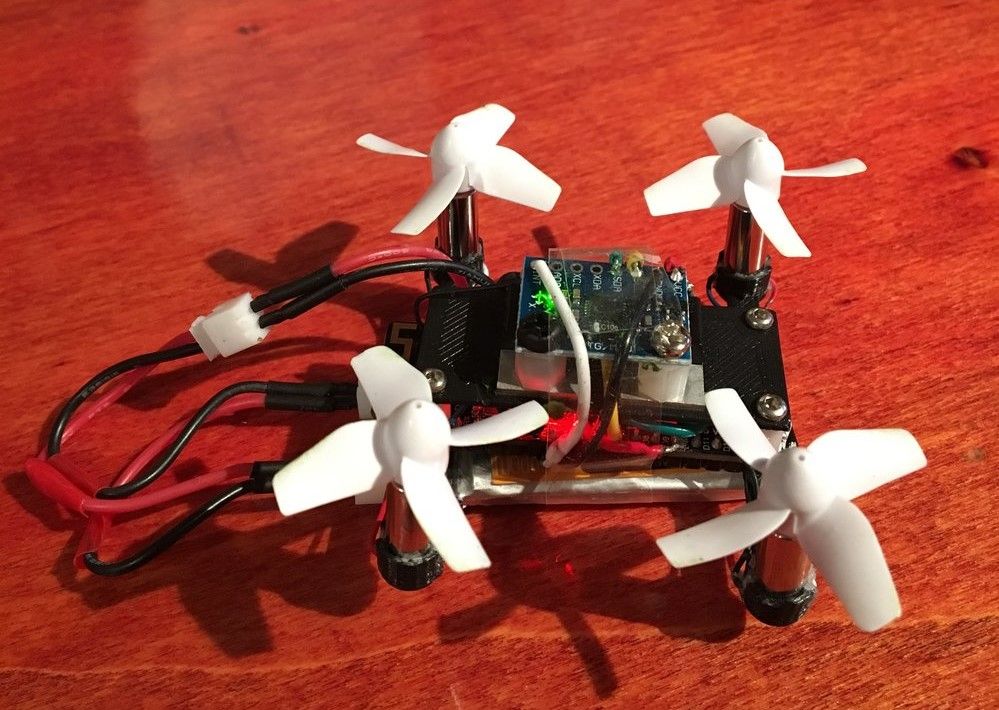
Final “Product”
The quadcopter failed to stabilize in air but was more than powerful enough to take off. I started looking into customized integrated circuits on Autodesk EAGLE after this project as I discover that the minimization of wires is key to projects that are required to be as light and simple as possible.
Links
Code: https://github.com/jiatinglu99/Arduino-Quady
3D: https://www.tinkercad.com/things/1yUZwCaFNzo