Spidy - Arduino Octopod Robot
Arduino-based 8-legged spider robot with custom radio controller. Features smooth servo motion algorithms, wireless control capabilities, touch-detecting legs, and bionic spider-like movement patterns.
Overview
Spidy was my first-ever DIY robotics project in 10th grade. Links to Code and 3D models will be provided at the end. Scroll down for more pics and videos. The video is the demo of Spidy’s movement.
Motion Smoothening
The motor movement has been smoothened in the program to achieve bionic spider-like motion.
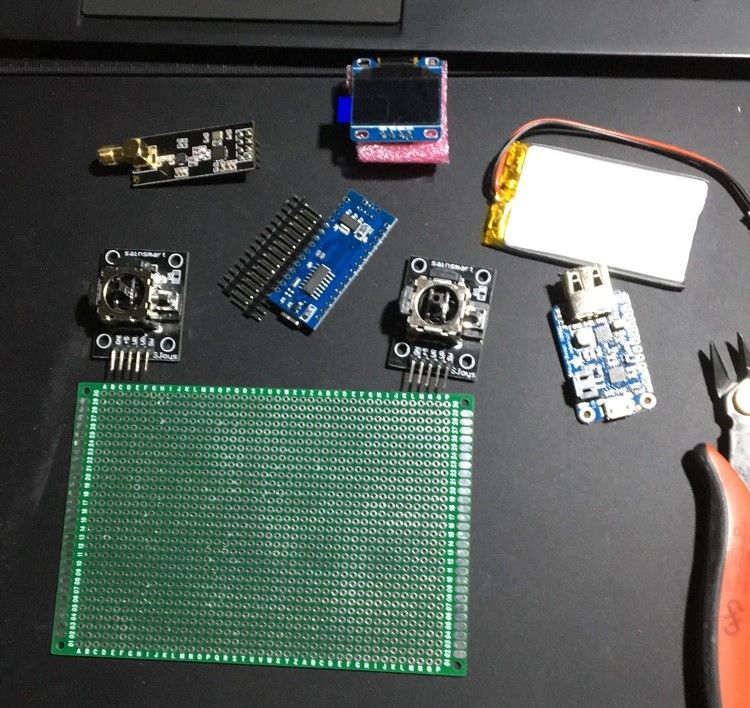
Controller Unit Components
- 1 x Arduino Nano,
- 1 x NRF24I01 radio modules,
- 1 x radio adapter(may come in bundle with the above link),
- 2 x Joystick,
- 1 x Charger module,
- 1 x Lithium Battery,
- 1 x OLED Display,
- N x tactile buttons or 5-way navigation buttons.
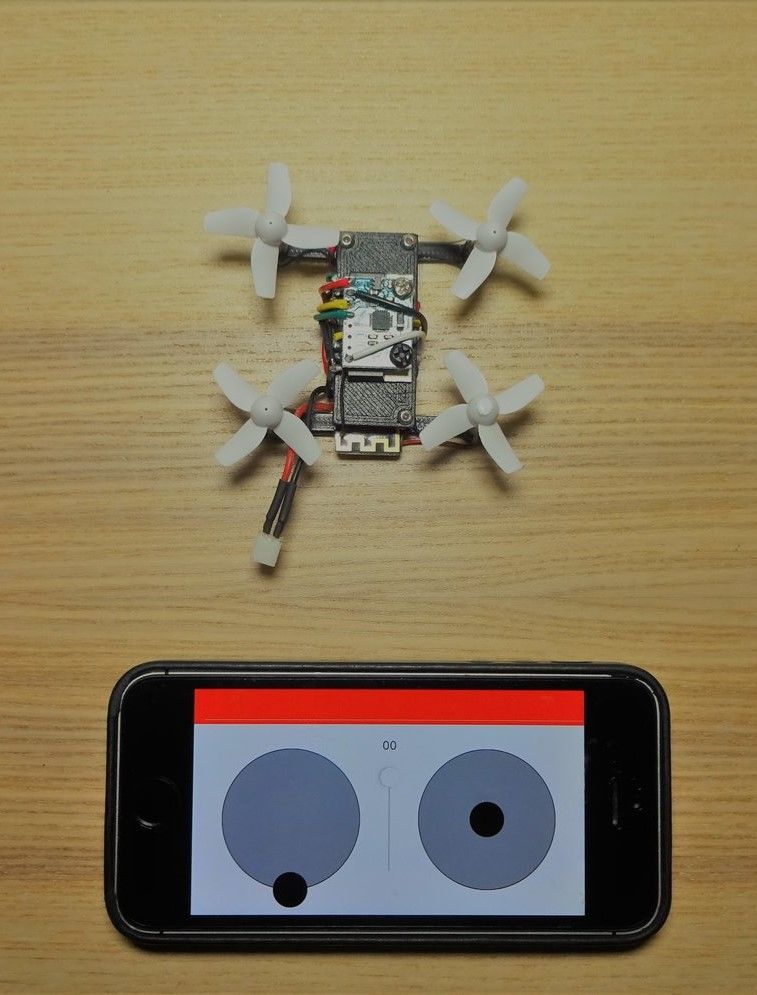
Controller GUI
A functional controller unit with a simple testing GUI. The battery is rechargeable through micro-USB.
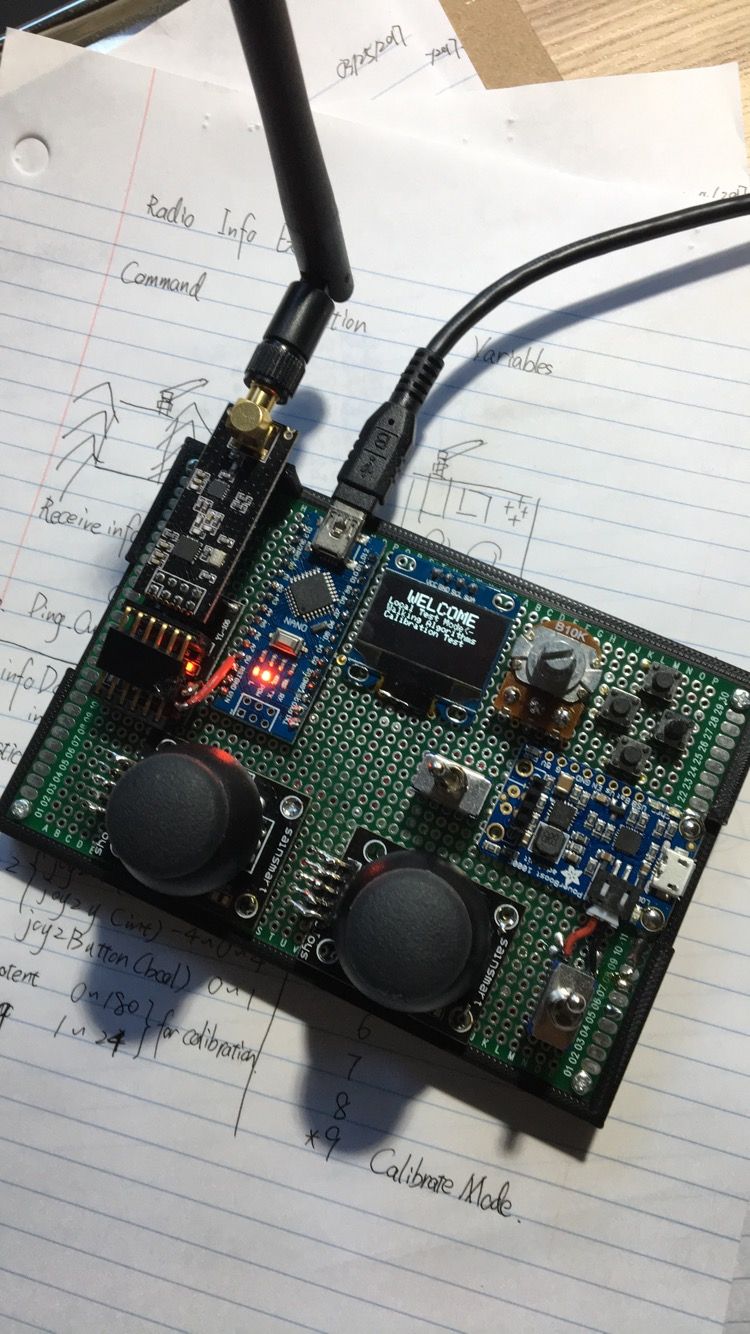
Circuit Soldering
My wiring and soldering skill was not at its best as this is my first electronic project by myself.
Spidy LOGO
The startup screen is my customized Pixel Spider logo.
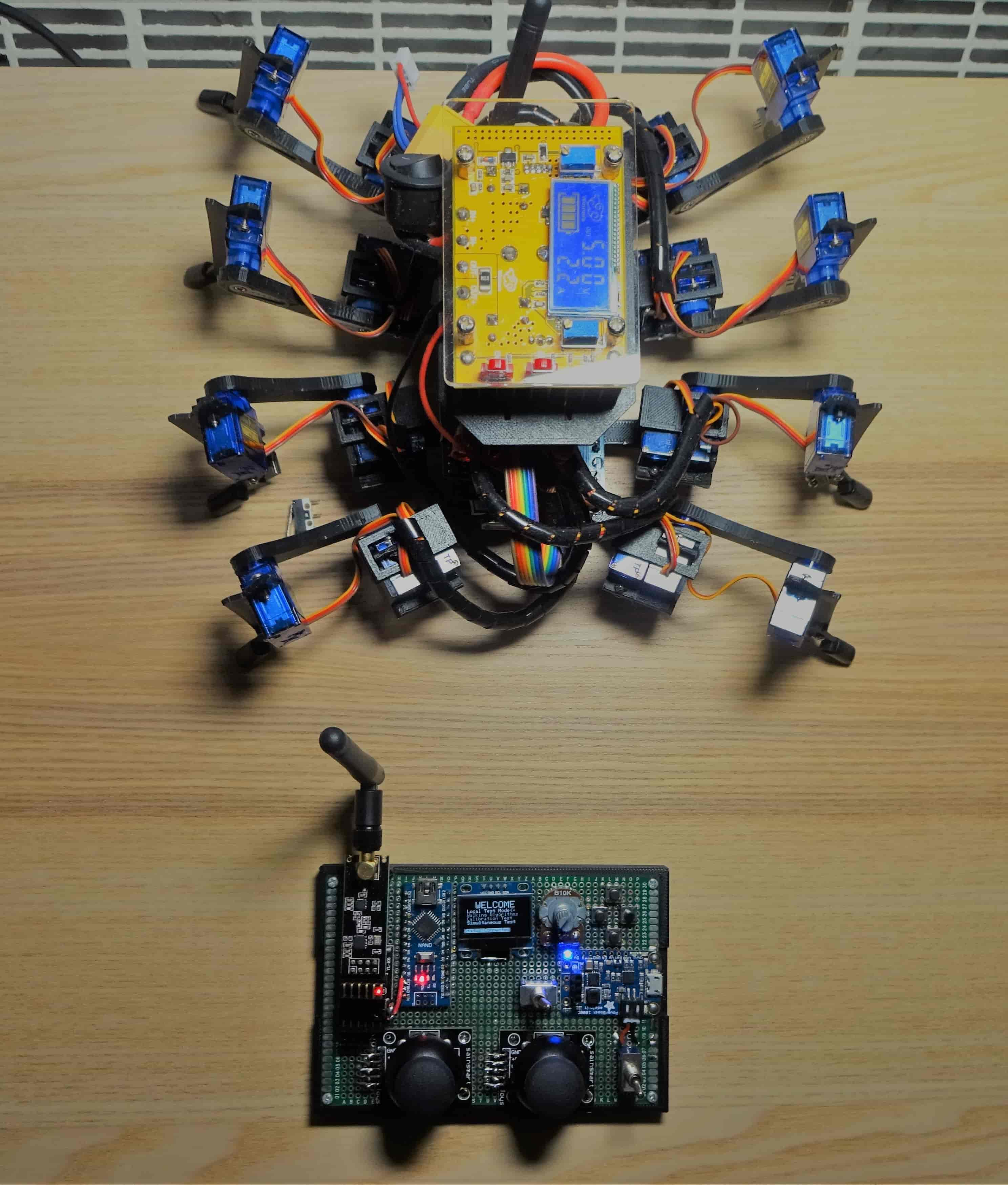
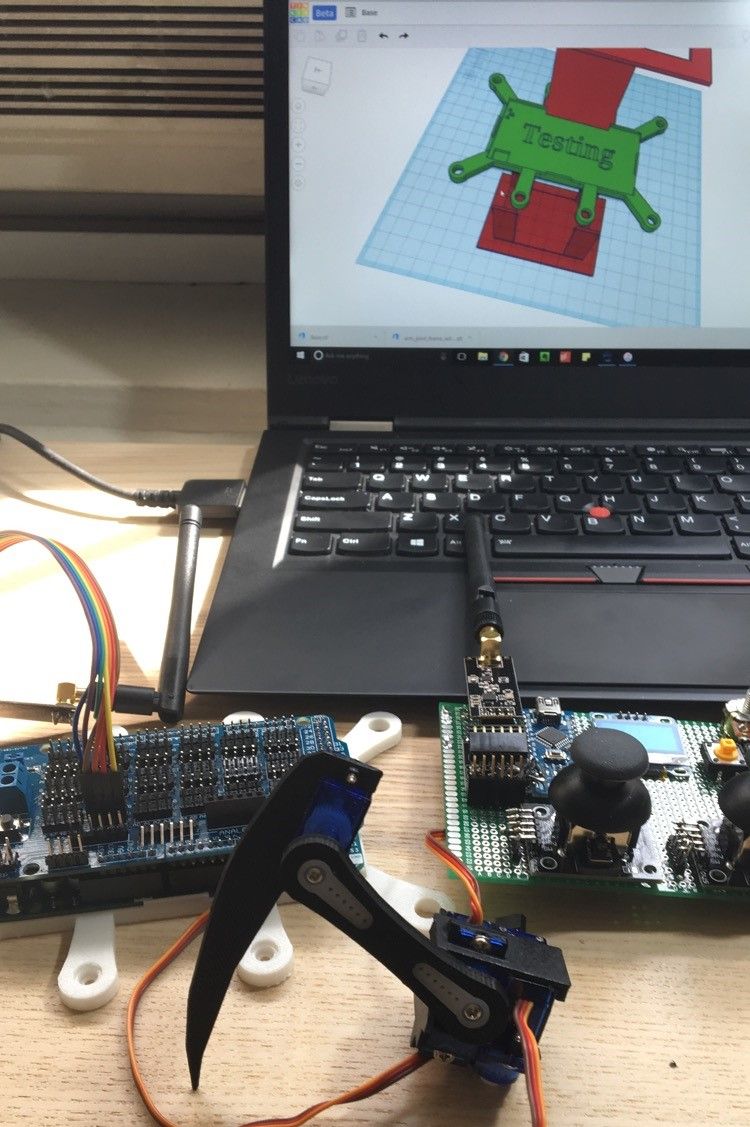
Body and Leg Design
An Arduino Mega with a servo shield, a completed controller without its case, and an assembled spider leg with 3 servo motors installed.
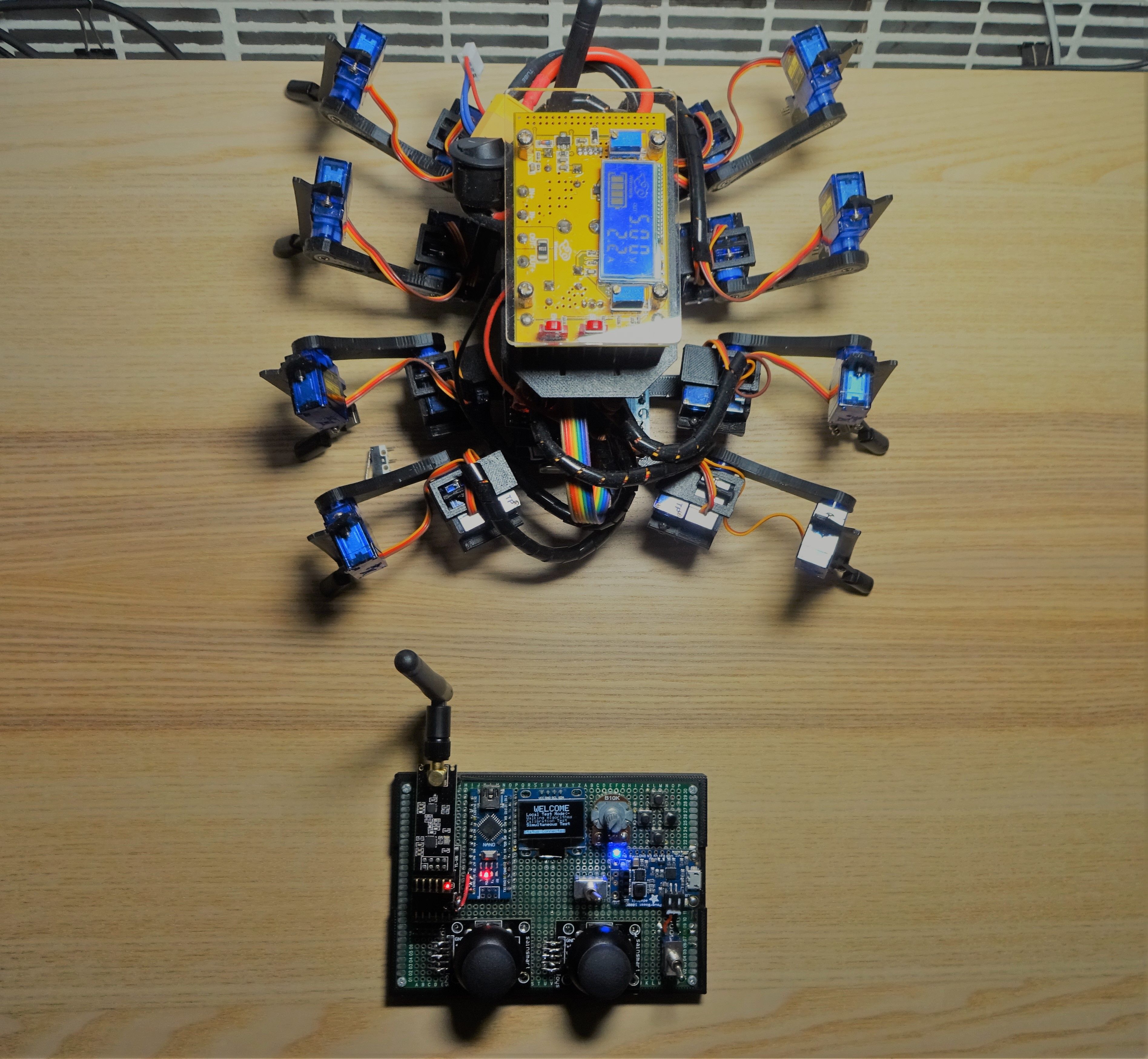
Completed Controller
A finished Controller with a solid 3D-printed case. The GUI indicates its wireless connection to Spidy and allows you to switch walking gait/algorithm and adjust individual motor base angle.
Servo Angle Correction
Individual motor correction from the radio controller.
Walking Algorithm Testing
Testing my walking algorithm in air.
Walking Speed Testing
Testing the maximum velocity of Spidy. Because the sharp tip of 8 legs don’t stick to the ground that well, I decided to design new touch-detecting leg with rubber tip.
LINKS
Code: https://github.com/jiatinglu99/Arduino-Spidy
CAD files:
https://www.tinkercad.com/things/btJxkIsPoQ8
https://www.tinkercad.com/things/kyyeG0oPm2c
https://www.tinkercad.com/things/3SHUKZcpVOv
https://www.tinkercad.com/things/9FsueHJEDek
New Leg Design
I designed new legs for Spidy that would allow it to detect if each leg has touched the ground. I installed all 8 of them but didn’t have a chance to wire them or update the program. But if you are interested in finding out how I am implementing new Touch-Detecting feature for my new Linux Spider — Spooder, click here.
Booting…
A very satisfying moment when Spidy’s power is turned on and jumps into default resting gait.
{kind=link}
Discover more...
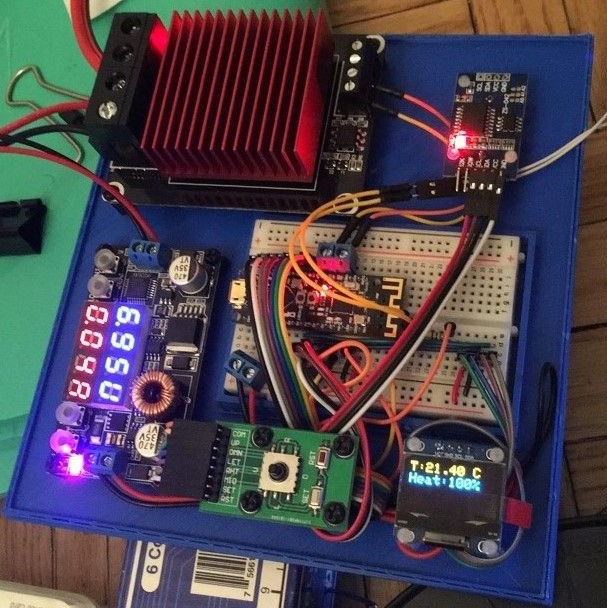
DIY Arduino Heat Bed for 3D Printer
Quady - Tiny Drone Design